
自主研发生产设备,持有多项专利
主营:高低温冲击箱、冷热冲击试验箱、两箱冷热冲击箱等设备
统一服务热线:
400-822-8565
158-9969-7899
主营:高低温冲击箱、冷热冲击试验箱、两箱冷热冲击箱等设备
400-822-8565
158-9969-7899
恒温恒湿控制部分软件设计
一、控制对象的特性
本系统的控制对象为恒温恒湿箱体的温湿度,相比于普通的温湿度控制对象,除了具有大时滞、大惯性的共性外,还有一些特殊的要求和特性:
(1)生物培养对温度超调敏感。恒温恒湿培养箱是用来为不同微生物创造适宜的生长环境,而生物的重要组成如蛋白质、核酸等对温度很敏感,体外培养时对低温的耐受力较对高温强,随着温度超范围的增高会遭受不可逆的破坏,所以温度控制要求尽量无超调。一般生物生长所需湿度比较高,比如细胞要求95%RH,接近饱和,所以生物对湿度的超调不太敏感。
(2)控制过程具有不对称性。培养箱是个带保温层的封闭箱体,所以温湿度上升容易降低难。升温通过电热管加热控制,而降温分为两种情况,当设定值不高于室温7℃时,通过压缩机制冷降温,其它情况下则完全依靠自然冷却。加湿通过雾化器实现,而除湿则通过自然风循环,因而温湿度的升降过程表现出截然不同的动态特性,这就对控制策略提出了更高的要求。而且加热片的余热很容易引起超调。所以控制效果要既防止出现超调过大,又要兼顾尽可能快的达到目标值。.
(3)滞后时间与温度有关。热辐射与温度成平方关系,升温时箱体热传递加快,从控制特性上表现为控制系统的时间常数、纯滞后时间减少,所以箱体系统的数学模型不是恒定不变的。
(4)湿度的波动影响温度恒定。培养箱是一种非线性耦合滞后系统,温度和湿度互相影响,由于实际工作对温度的恒定要求较高,所以克服湿度波动对温度的影响更为重要。
(5)系统易受干扰。培养箱的干扰因素多,且干扰量大。电热管的发热功率与电网电压的平方成正比,所以如果电网电压波动,电热管的发热功率会发生较大波动,系统的稳定性受到干扰。
二、基本模糊控制设计
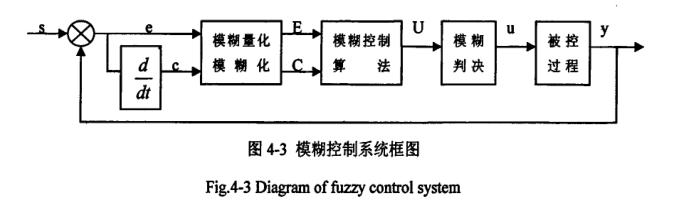
对于恒温恒湿培养箱这样一个具有非线性、大滞后、大惯性、时变性、升温单向性等特点的控制对象,很难用数学方法建立的数学模型。传统的控制理论和方法如PID控制,容易超调,温湿度一旦升高很难降下来,造成调节速度慢,控制效果不理想;而模糊控制利用人类专家控制经验,对于复杂对象的控制显示了鲁棒性好、控制性能高的优点。根据模糊控制器设计步骤,如图4.3所示,借助用于数值计算的通用软件Matlab中的模糊逻辑工具箱(Fuzzylogic contr01),设计模糊控制系统,方便快捷,易于修改和仿真,并可计算出离线控制表,供在线控制程序使用。
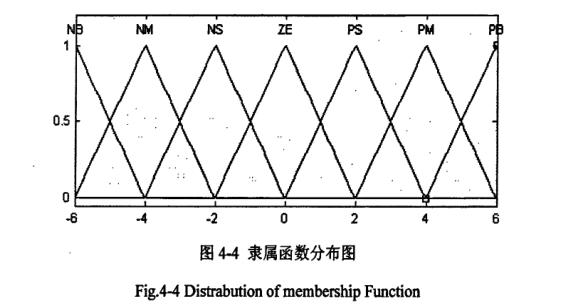
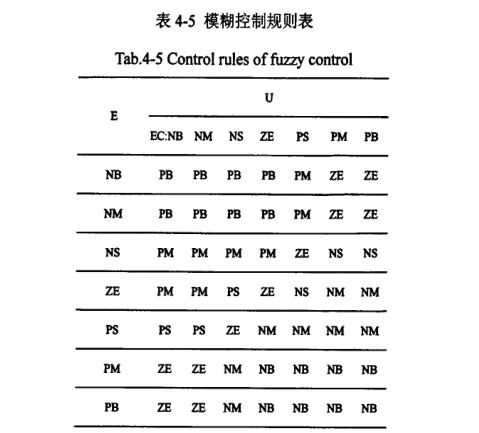
设计基本恒温模糊推理系统图形界面的编辑器类型为Mamdani型。仿照人的控制经验,该控制系统包括两个输入变量(误差E,误差的变化EC)和一个输出变量(控制量的变化U),是一个二维模糊控制器。模糊量E、EC和U的模糊集均取{NB,NM,NS,ZE,PS,PM,PB},意义为{负大,负中,负小,零,正小,正中,正大>。相应的论域均为。隶属函数采用三角形,函数曲线在论域上等距离分布,如图4.4所示。根据手动控制策略的实验,总结出一套模糊控制规则,共49条,如表4.5所示。模糊推理系统的基本属性设定为:“与’’运算采用极小运算,“或"运算采用极大运算,模糊蕴含采用极小运算,模糊规则综合采用极大运算,去模糊化采用重心法。这样既可保存为一个FIS文件,在模糊控制系统中作为一个独立封装的模块,在在线程序中表现为一个离线输出的查询表。在这个基本模糊推理的基础上,调节量化因子和比例因子,反复实验,实现模糊控制的要求。此设计过程同样适用于湿度的基本模糊控制设计。
三、仿真设计
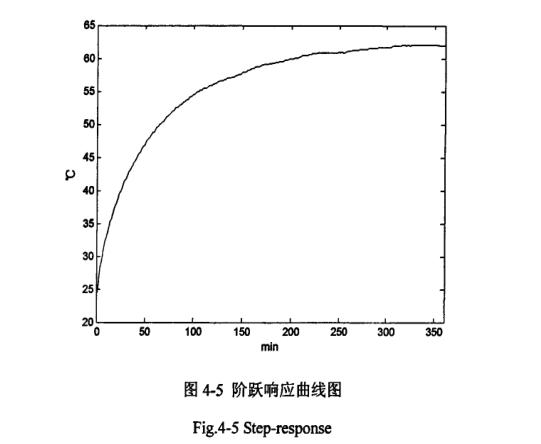
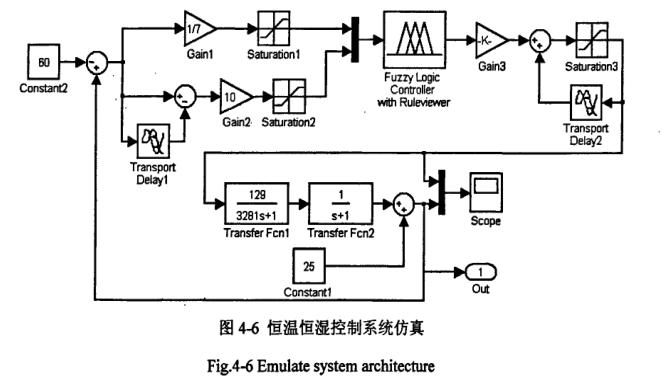
把建立的模糊推理系统在Matlab的Simulink仿真环境中进行仿真分析,可以迅速找到合适的量化因子和比例因子,指导实际调试。为增加仿真的真实性,关键是逼近箱体的数学模型。根据过程控制系统理论的分析,该恒温系统可以等效为为双容自平衡系统,对以上恒温恒湿系统模型搭建模糊控制系统仿真,如图4.6所示,其中FuzzyLogic Controller with Ruleviewer为封装的模糊推理模块,输入输出限幅均为,增量式输出需累加后再作为入量。室温25"C,湿度27%,目标温度60℃,目标湿度80%。由于箱体的响应时间比较长,控制周期取10s。控制结果通过示波器察看或通过输出模块输出到工作空间。
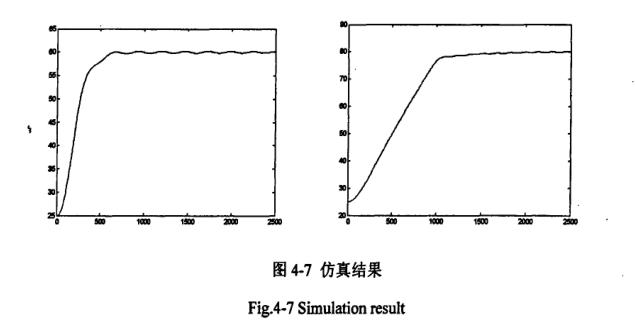
由于培养箱具有升温容易降温难的特点,超调越小越有利于缩短调节时间,所以仿真首先实现无超调,再力求调节时间短和静态误差小。但也要兼顾过多的控制超调会增加过渡时间。相对其他控制方法,模糊控制在提高动态性能方面占优势。电热管的实际通断时间是以交流周波的整数倍控制的,仿真将其转化为功率控制,实际控制不如仿真中控制的精细,所以比例因子不能太小。在仿真中会得到不同的量化因子和比例因子的组合,都能使系统获得较好的响应特性,对此系统应取比例因子较大的组合。根据量化因子和比例因子对系统动静态性能影响的规律,反复调节仿真试验,确定温度控制系统中ke=l/4,kde=10,ku=5;湿度控制系统中ke=l/3,kde=24,ku=3时,能够满足该系统的要求。仿真结果如图4.7所示。
四、在线插值的模糊控制算法设计
在Matlab中设计的模糊推理模块,要得到在线程序的查询表,只需在命令窗口中依次键入如下命令:
aa--readfis(’fz’)
m=-6:1:6;
n=-6:l:6;
for i=l:13
forj=1:13
q(i,j)=evalfis([m(i);n(j);
end
end
通过evalfisOi函数循环输出的查询表只有有限个离散档,模糊量化取整致使调节不精细,无法达到仿真的稳态效果。Matlab的模糊控制工具箱之所以能把稳态控制的很细腻,其本质是量化时对粗糙的控制表作了插值。为了消除稳态误差和稳态振颤,在经典的模糊控制算法中引入在线插值,既不会增加模糊控制的复杂程度,又弥补了模糊控制稳态性能的不足。插值的方法很多,这里采用矩形域内的二元插值法。模糊量E和EC的论域分别有13个离散档,以此横纵分割,把控制表分成144个小矩形区域,每个小矩形的四个顶点值从控制表查询得到。对论域内的任意E和EC,均可落在一个小矩形区域内
五、模糊PID控制算法的设计
以上使用的在线插值的模糊控制算法,具有无超调和调节时间短的动态效果优势;在线插值修正了单一模糊控制稳态效果差的不足,但仍然不能得到PID的稳态效果。模糊逻辑控制器动态性能抗扰性和PID控制器稳态精度高,取两者的优点就构成模糊PID控制器。模糊PID控制器是一种在常规PID调节器的基础上,应用模糊集合理论根据控制偏差、偏差值,在线自动整定比例系数、积分系数和微分系数的模糊控制器。其控制器不仅保持了常规PID控制器的优点,而且具有很强的鲁棒性和适应性。http://www.dgzhenghang.com.cn
 东莞市正航仪器设备有限公司 Copyright © 版权所有
东莞市正航仪器设备有限公司 Copyright © 版权所有contact us
地址:广东省东莞市寮步镇岭安街2号手机微信号

微信公众号

手机网站


